Overview
Dr. Goodman's work in Collective Robotics and Swarm Intelligence drew inspiration from biology, particularly the way simple subsystems (like ants) can result in complex, system-level behavior (like a functioning nest).

The Ant Bridge – Ants form a bridge
for other ants to cross a gap.
Key Research Questions
• How can biological principles be applied to engineering systems?
• How can we design low-level behaviors for simple robots that interact to produce complex behaviors?
Applications
These principles have been applied to various fields, including:
• Routing in communications networks
• Control of automotive traffic
• Satellite control

Milestones
In 2000, the first-ever course on Swarm Intelligence was developed and taught at Caltech by Rod Goodman, Alcherio Martinolli, and Owen Holland using this text book.
Collaborations
The research group included notable collaborators such as Alcherio Martinoli (EPFL), Owen Holland (Sussex University), and Alan Winfield (University of the West of England).
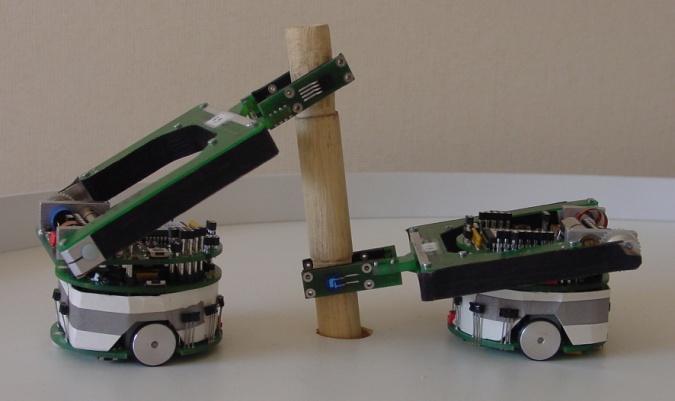
Collaboration via indirect communication (stigmergy)
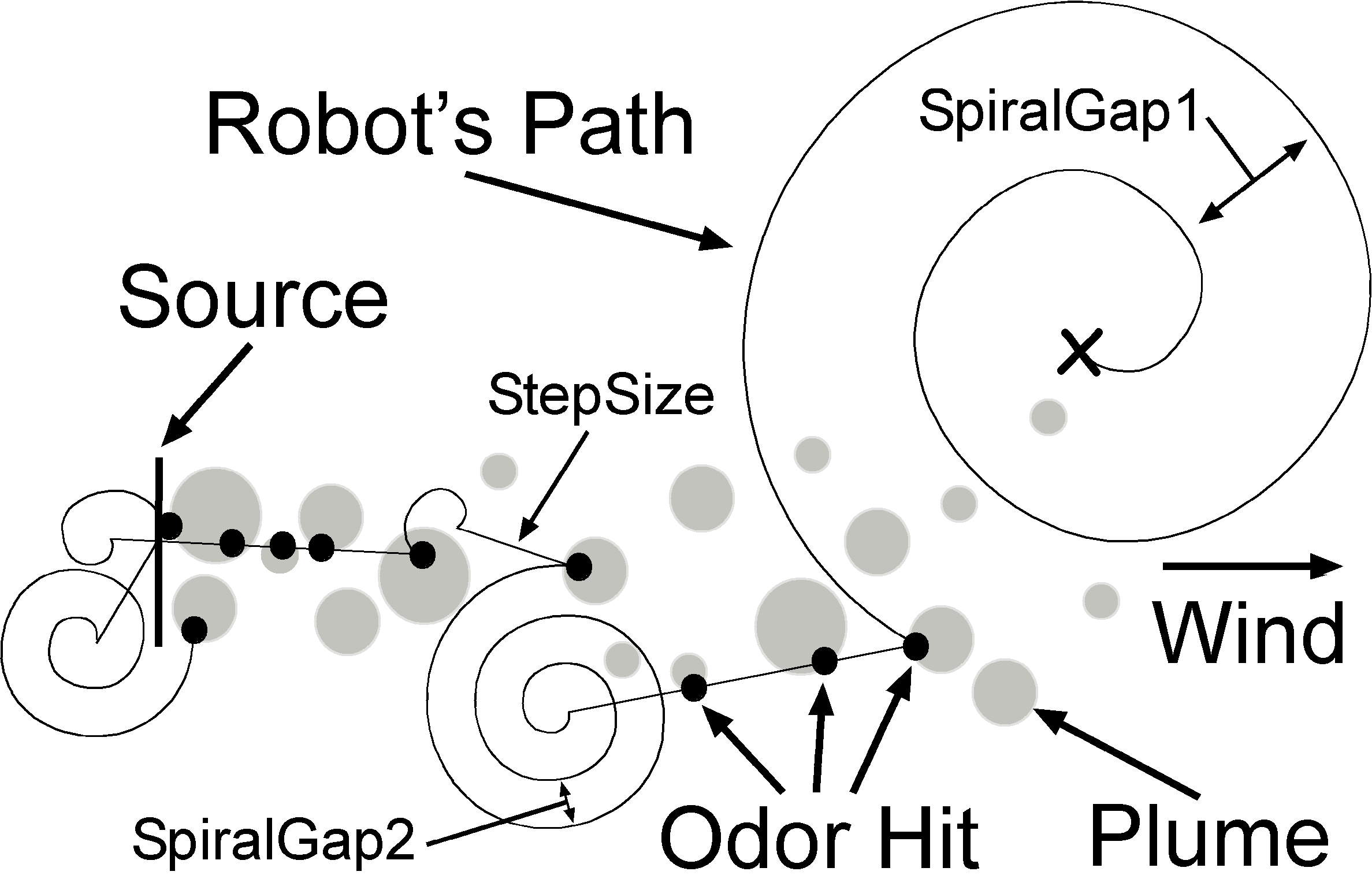
Dr Goodman's collective robot lab showing robots collaborating to find the source of an odor

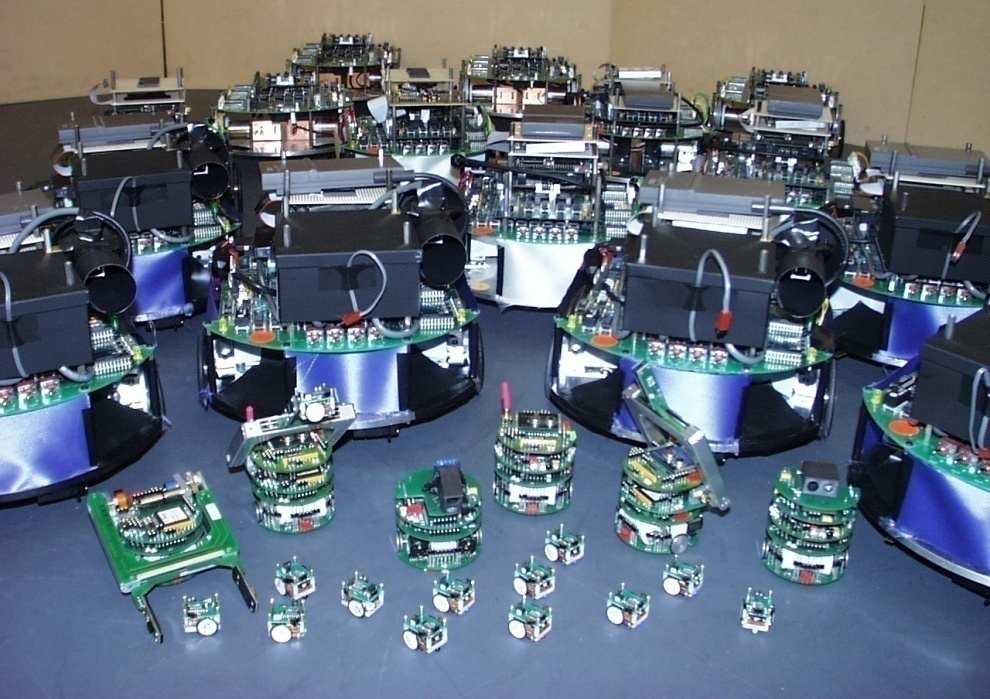
Goodman Caltech Collective Robotics Lab Robots: MooreBots, Kephera, Alice.